
avoids costly and
repetitive work for operators
whitin a bin (box, crate, pallet...)
refers to the picking of parts,
randomly disposed
whitin a bin (box, crate, pallet...)
avoids costly and
repetitive work for operators
improves performance
proprietari ottimizzati per le diverse applicazioni,
caratterizzati da elevata accuratezza di misura e insensibilità alla luce ambiente
three-dimensional vision system
based on laser triangulation and
matrix camera for enhanced
measurement accuracy and
insensitivity from
environmental lighting conditions
improves
performance
regardless of color
and illumination
algorithms based on "surface based" approach
3D pattern matching algorithms
based on "surface based" approach
of the parts:
regardless of
color and
illumination
picks up each part while avoiding collisions
e di generare la migliore traiettoria
convenient gripping point on the part
and generate the best robot path
picks up each part
while avoiding
collisions
the flexible and compact solution
cumbersome mechanical magazines
the flexible
compact solution
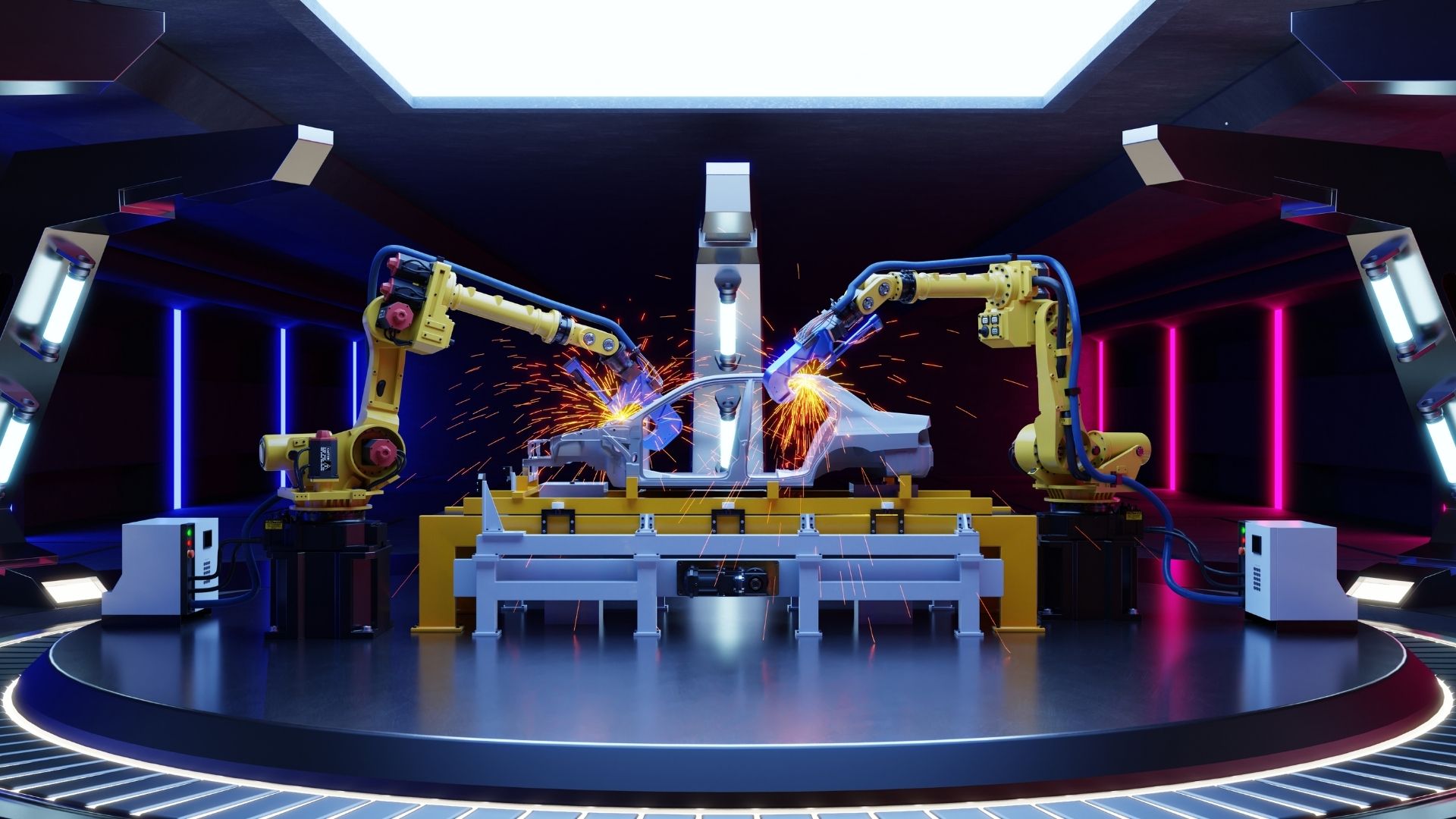
Welcome to the era of Intelligente Bin Picking
Bin Picking allows you to avoid costly and rigid mechanical part orientation systems and relieve the operator of repetitive and wearing work.
With 3D CPS systems, the part model set is compared and searched within the point cloud regardless of object color and normal ambient lighting conditions.
They also make it possible for the robot to pick up each part while avoiding collisions with the surroundings, the bin, and other parts within the bin itself.
Versatility
Management of different situations
Robustness
Management of unpredictable cases
Reliability
Complete with all driving functions
Test Center: We test and implement the random bin-picking application for you
Bin Picking is a truly “meta-discipline.”
It is essential that the vision system, the management of gripping poses, the robot route plans, and the efficiency of the picking tools are all optimal for the application. Solid experience and constant experimental activity are essential for the development of robust and easily reconfigurable applications.
That is why at ISS we always have several robot islands available and equipped with our CPS 3D robot guiding systems.
Find out what we can offer you: Our sectors


Read about our last news

ABB opens the doors of its showroom to show customers some of the many potentialities of Bin Picking, thanks to the ISS 3D CPS FAST system.

It was with great pleasure that ISS accepted the invitation to be present in the KUKA showroom to show how, with appropriate means such as the...
ISS is continuing the development of its robot guidance systems by developing an industrial research project within the framework of the INNODRIVER S3...